| Type |
DA, MA |
| Supervisor |
Prof. Dr.-Ing. Alois Knoll |
| Advisor |
Dipl.-Inf. Michael Geisinger |
| Student |
|
| Research Area |
Distributed embedded systems |
| Associated Project |
EasyKit / Multifunk |
| Programming Language |
C |
| Required Skills |
C, Design and assembly of electronic circuits |
| Useful Knowledge |
|
| Announcement |
Project announcement in PDF format |
Background
The area of industrial automation involves complex computer systems which traditionally have a centralized architecture. The controller part in these systems is a programmable logic controller (PLC), which is usually attached to a network for monitoring and control and provides interfaces for controlling the actual sensors and actuators involved in the industrial production process.
However, there is currently a trend in the direction of decentralized industrial automation architectures, where sensors and actuators are made "intelligent". This is achieved by placing a microcontroller directly at the sensor or actuator so that the device can be directly attached to a network or bus system.
Description
The chair for Robotics and Embedded Systems has various mock-up models of small and large industrial production lines that are used for educational purposes in its lab courses. One of these models is still using the traditional PLC-based architecture as pointed out above. The task of this project is to replace the current architecture with a decentralized distributed system. Ideally the system should consist of heterogeneous microcontrollers, meaning that different microcontroller types and architectures are used. In addition, programming of the system should be refined and well documented for use of students in the lab course.
Tasks
- Introduction to the used tools: Keil µVision, AVRStudio, EasyLab
- Design and assembly of a microcontroller interface board
- Adaptation and test of the production line mock-up model
- Implementation of a communication protocol on the microcontrollers
- Implementation of an example program that demonstrates the setup
- Preparation of teaching materials (e.g., a software framework) and documentation
Literature

|
|
|
Assembly Line Model
|
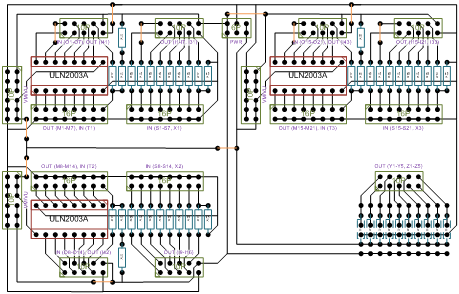
Controller Interface Board
|